并发控制: 互斥(1)
上节回顾:虽然 “线程库” 入门简单,但多处理器、编译优化、缓存和动态流水线迫使我们 “放弃” 许多顺序程序编程时的基本假设,给理解、编写并发程序带来了困难。
本讲内容:人类从来不害怕困难。我们通过创造出新的手段,帮助我们编写正确的并发程序:
- 互斥问题和 Peterson 算法
- 原子指令和自旋锁
并发控制 - 阻止并发
并发给并发程序带来了一系列不容易被我们直接察觉的 bug (例如某山寨支付宝的错误扣款例子)。我们有没有什么办法可以对并发进行控制呢?
也许 阻止并发 是唯一的方法。但是,如果 阻止并发 是对并发进行正确控制的唯一方法,那么并发为什么要存在?
看起来,并行总归是有作用的:只要在不需要并发的时候阻止并发,其余情况下启用并发,并发总能给程序执行提速。
实现互斥 - Stop the World
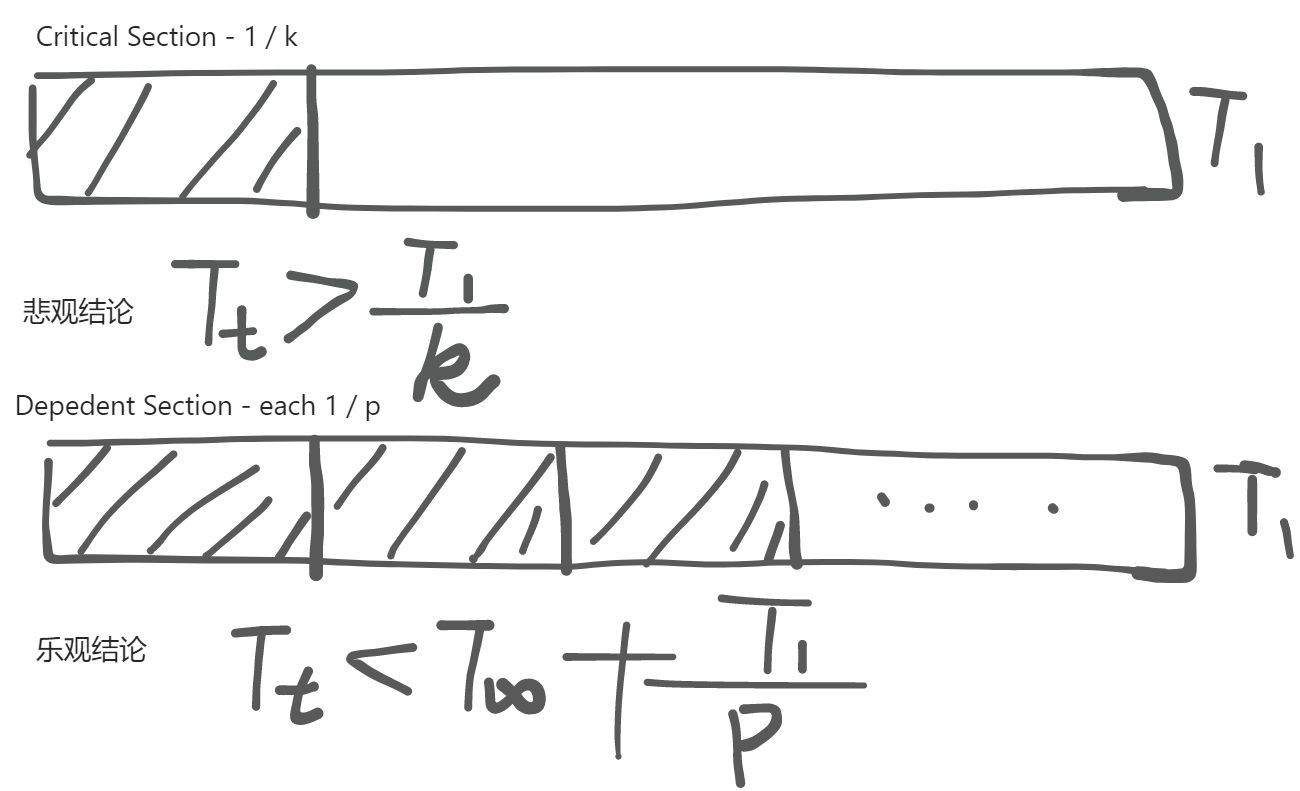
为了尽可能避免并行带来的一系列 bug ,我们试图通过添加锁来保证指定状态迁移步骤的原子性。简单来说,就是当某个线程持有锁的时候,其他状态迁移不能够入侵该线程的状态迁移过程,以此实现持有锁过程中状态迁移的原子性。
那么如何实现互斥呢?
- 单处理器系统:关闭中断 (剥夺切换状态机的能力)
- 多处理器系统:???
然而,道高一尺,魔高一丈。处理器中存在着 NMI (Non-Maskable Interrupts,不可屏蔽中断),例如掉电中断等情况。
关中断并不是万能的:
操作系统 可以,但普通程序不行
中断保证了死循环不能把计算机 “卡死”
操作系统不允许普通程序关中断

但如果是操作系统代码,完全可以短暂关闭中断
操作系统内核中关闭中断")
单处理器系统 可以,多处理器系统不行
每个处理器有独立的寄存器组
中断是每个处理器内部状态
对于操作系统上的应用程序,关闭中断是不能容忍的:这会使微小的 bug 或是恶意的程序破坏计算机的运行。操作系统正是因为统治了中断,才实现了对应用程序的管理。在操作系统内核的实现中,关闭中断是一个常见的操作。
实现互斥 - Peterson 算法
Dekker 算法
A process $ P $ can enter the critical section if the other does not want to enter, otherwise it may enter only if it is its turn.
Peterson 算法 - Dekker 算法的改进
A process $ P $ can enter the critical section if the other does not want to enter, or it has indicated its desire to enter (意图) and has given the other process the turn (让步).
一个简单的例子:
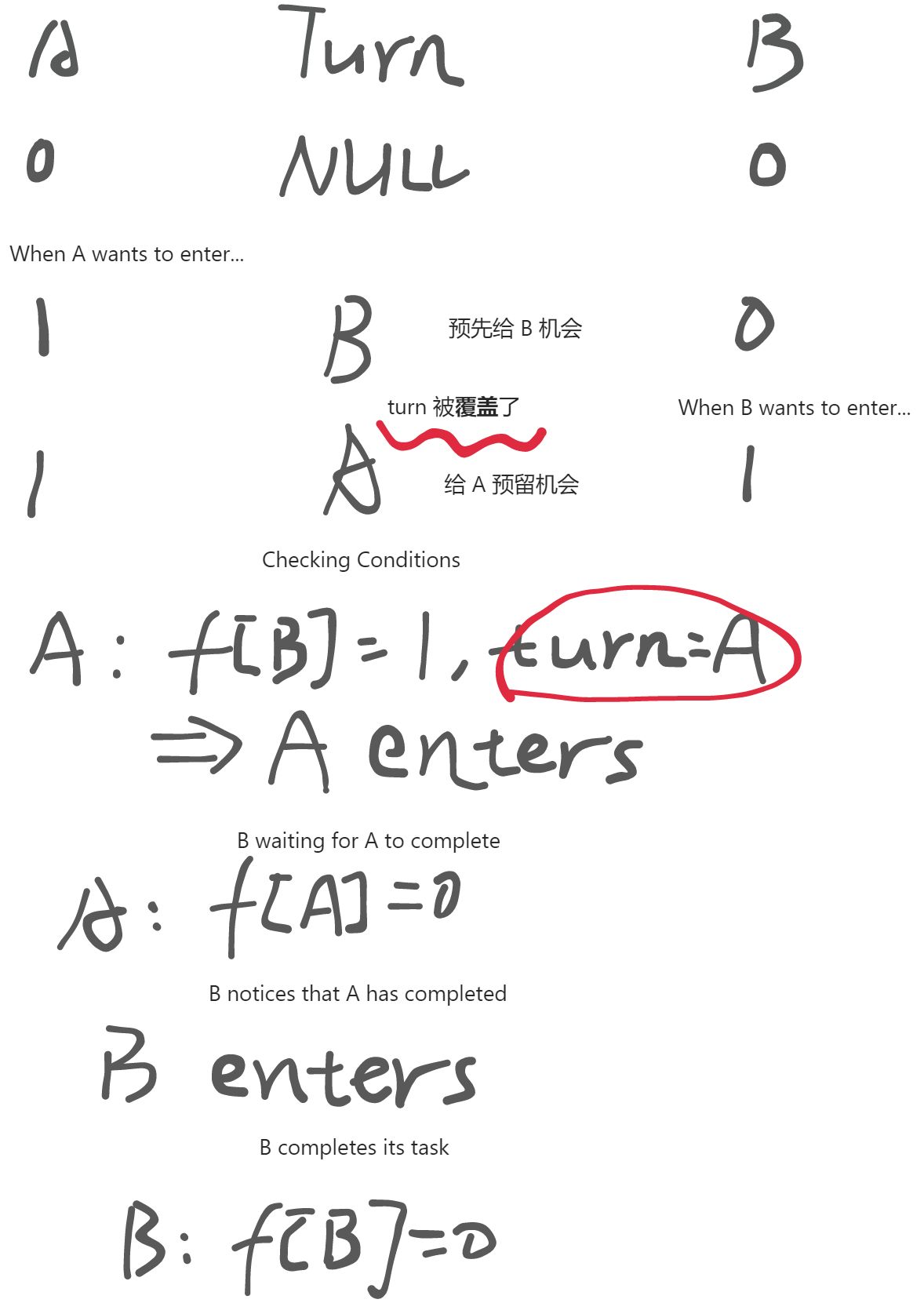
来简单归纳一下游戏规则吧:
- 当一个线程想要进入 Critical Section 时,需要将自己对应的旗子举起,并且预先将执行权限分配给其余线程中的某一个(即改变 turn 的值为另一个线程)。
- 在这个线程执行完上述设置操作后,该线程将会进入持续的观察者模式:
- 观察其余线程中是否存在举旗的线程,如果没有则直接进入 Critical Section
- 如果存在举旗线程,则观察 turn 变量的值 (可以理解为下一个待执行的线程),如果为自己则进入 Critical Section,否则继续等待
- 线程执行完成 Critical Section 区域的代码后,需要放下自己的旗子
当有多个线程同时尝试进入 Critical Section 时,线程的手快程度直接影响了其余线程被优先执行的概率 —— 你写入的 turn 很有可能会被后续写入的线程覆盖,但是你写入的 turn 值是其余线程。看起来 Peterson's Protocol 是一个谦让协议,但是实际上它是个利己协议。
Peterson's Algorithm - 实现
def T1():
while True:
heap.x = '🏴'
sys_sched()
heap.turn = '❷'
sys_sched()
while True:
t = heap.turn
sys_sched()
y = heap.y != ''
sys_sched()
if not y or t == '❶':
break
sys_sched()
heap.cs += '❶'
sys_sched()
heap.cs = heap.cs.replace('❶', '')
sys_sched()
heap.x = ''
sys_sched()
def T2():
while True:
heap.y = '🏁'
sys_sched()
heap.turn = '❶'
sys_sched()
while True:
t = heap.turn
sys_sched()
x = heap.x
sys_sched()
if not x or t == '❷':
break
sys_sched()
sys_sched()
heap.cs += '❷'
sys_sched()
heap.cs = heap.cs.replace('❷', '')
sys_sched()
heap.y = ''
sys_sched()
def main():
heap.x = ''
heap.y = ''
heap.turn = ''
heap.cs = ''
sys_spawn(T1)
sys_spawn(T2)上面的代码在我们的 Model Checker 上执行的结果是正确的。
但是,如果在现代“编译器化”的处理器上执行,会输出正确的结果吗?
答案是 否定 的。
我们重新用 C 语言编写了一个 Peterson's Algorithm 的实现:
#include "thread.h"
#include
#define A 1
#define B 2
// The caveat is: no matter how many times we run this test
// without seeing it fail, we cannot be certain that we have
// inserted sufficient barriers. Understanding the correctness
// of this code is far beyond the scope of this course.
//
// #define BARRIER __sync_synchronize()
//
// Peterson's algorithm is wrong without proper barriers:
//
#define BARRIER
atomic_int inside;
long count;
void critical_section() {
// We expect this thread executing code exclusively,
// if the critical section is correctly implemented.
assert(
// assert(inside == 0);
// inside++
atomic_fetch_add(&inside, +1) == 0
);
// On some machines, printing a character will hide
// the bug!
// putchar('.');
assert(
// assert(inside == 1);
// inside--
atomic_fetch_add(&inside, -1) == 1
);
}
int volatile a = 0, b = 0, turn;
void T_A() {
while (1) {
a = 1; BARRIER;
turn = B; BARRIER; // <- this is critcal for x86
while (1) {
if (!b) break; BARRIER;
if (turn != B) break; BARRIER;
}
// T_B can't execute critical_section now.
critical_section();
a = 0; BARRIER;
}
}
void T_B() {
while (1) {
b = 1; BARRIER;
turn = A; BARRIER;
while (1) {
if (!a) break; BARRIER;
if (turn != A) break; BARRIER;
}
// T_A can't execute critical_section now.
critical_section();
b = 0; BARRIER;
}
}
int main() {
create(T_A);
create(T_B);
}运行结果:

我们给它重新加回 Barrier 之后,会怎么样呢?

虽然加了 Barrier 能够使程序的行为变得“看起来”正确,但是你能确定哪些地方的 barrier 是不可少的吗?
因为 Peterson 算法在现代处理器上需要添加许多屏障(或许有许多地方可以优化,但是你基本上无法确定哪些地方的屏障是必不可少的),所以该算法在现在已经不怎么使用了。
多处理器系统上的互斥
实际上,互斥的根本目的是为了保证 Critical Section 操作的原子性。
为了在软件方面实现原子迁移,人类提出了 Dekker 算法、Peterson 算法...甚至还需要加装许多你无法完全确定如何优化的屏障来保证正确性...
但是,在计算机上,软硬件是互补的,因此“软件不够,硬件来凑”。
如果要在硬件方面实现互斥以保证 Critical Section 操作的原子性,我们也许可以小小的借用一下 Stop the World 的能力 —— 使用原子指令。
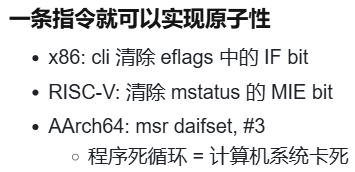
原子指令提供了一小段时间的“Stop the World”执行能力,为状态迁移的原子性做了保证。
- 不可打断的 load + 计算 + store
- x86: Bus Lock; RISC-V: LR/SC (来自 MIPS) + atomic
有了原子指令,总算可以在多处理器上实现 并行 1 + 1 了!
- x86: Bus Lock; RISC-V: LR/SC (来自 MIPS) + atomic
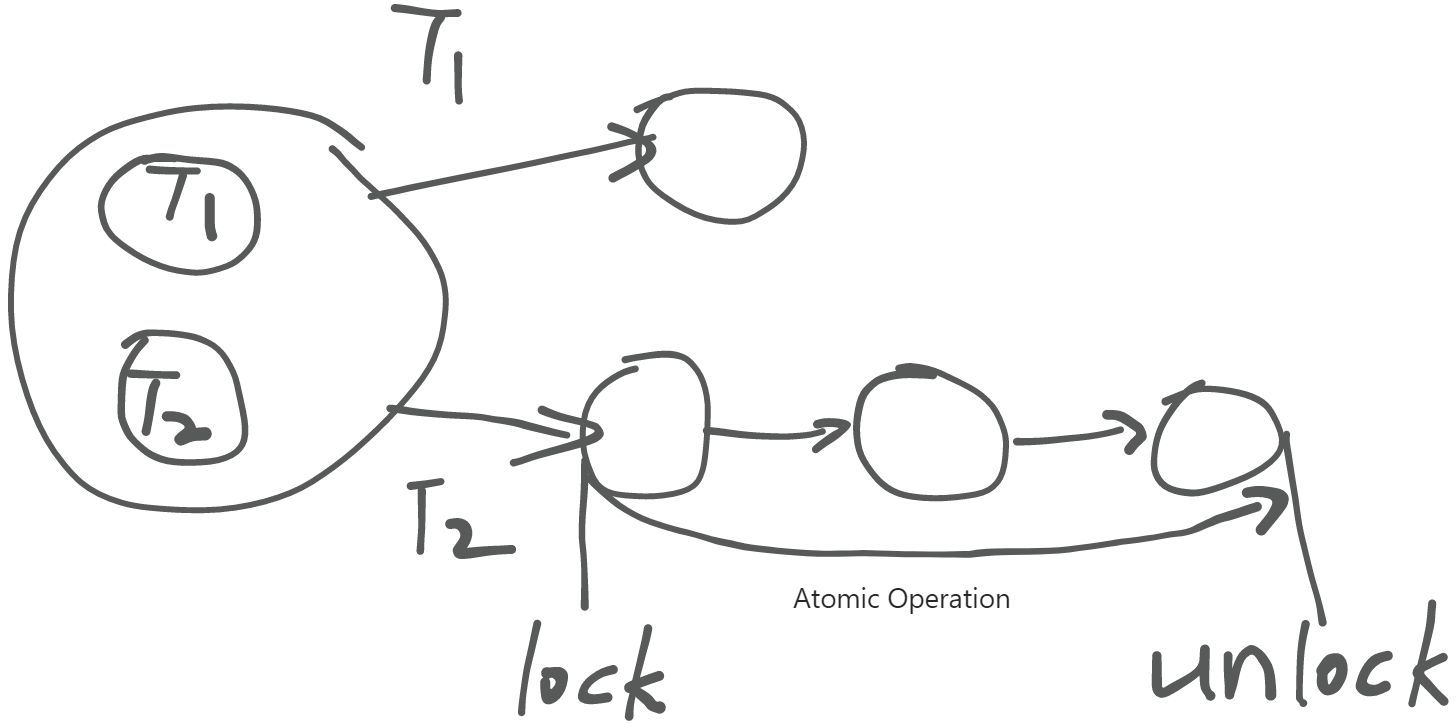
原子指令实现自旋锁
自旋锁: 类似于电子的自旋,线程在等待锁的过程中会一直将自身的 status 与 ❌ 交换,形成 ❌ - ❌ 自旋
int status = ✅;
// 这个进程状态机中只存在一个✅
void lock() {
retry:
int got = atomic_xchg(&status, ❌); // 原子交换指令
// 手慢的进程会一直在这里“自旋”
if (got != ✅) {
goto retry;
}
}
void unlock() {
atomic_xchg(&status, ✅);
}一核自旋中断,多核自旋?
解决方案:操作系统短暂关中断